
기술 관점에서 볼 때 우리는 지금 고도로 발전된 디지털 시대에 살고 있다. 디지털 기기와 기술이 우리의 일상 곳곳에 스며들어 있어 이들과 떨어져 하루를 지낸다는 것은 거의 불가능할 정도다. 스마트폰의 연산 능력은 불과 몇 세대 전의 우주왕복선의 연산 능력보다 뛰어나고, 초고속 통신망을 통해 가상현실 수준의 초고해상도 영상을 어디에서나 볼 수 있다. 스마트 기기로 지금처럼 쉽고 저렴하게 집과 사무실을 자동화할 수 있다고 말하면 10년 전에는 아무도 믿지 않았을 것이다.
에너지 관점에서 볼 때는 전세계 전기 사용량의 절반 이상은 아직도 전동기기에 쓰이고 있다. 전동기기란 모터(Motor), 컴프레서(Compressor), 엑츄에이터(Actuator), 제너레이터(Generator) 등 전기를 에너지원으로 물리적인 움직임을 일으키는 기계다. 이 전동기기들이 사용하는 전세계 에너지의 백분율은 앞으로도 크게 늘어날 예정인데, 이는 바로 요즘 자동차 시장에서 무서운 속도로 성장하고 있는 전기자동차 때문이다.
이 전동기기들의 ‘물리적인’ 움직임은 어쩔 수 없이 마찰과 진동을 수반한다. 이는 윤활유가 마르거나 부품이 마모되는 문제를 유발하고, 축이 뒤틀리거나 마운트(Mount)가 경화 또는 파손되는 등의 다양한 문제로 이어질 수 있다. 따라서 전동기기는 자주 정비(Maintenance)해야 하며, 이를 통해 제작 시 의도됐던 만큼의 수명과 성능 레벨을 보장할 수 있다.
더 스마트한 정비 방법: CBM
이처럼 중요한 정비를 우리는 언제 하게 될까? 보통은 소 잃고 외양간 고치는 경우가 많다. 기계가 완전히 망가져 너무나 뻔한 오동작 신호를 보낼 때가 되어서야 겨우 알아차리기 때문이다. 예를 들면, ‘에어컨에서 시원한 바람이 나오지 않는다’고 느끼고 나서야 어떤 부분이 고장 났는지 확인할 생각이 들고, 컴프레서가 고장 나서 평소와 같은 소리가 나지 않는다는 것을 발견한다.
어떨 때는 이런 오동작 신호가 운 좋게 오늘 확인해본 전기세 고지서일 수도 있다. 평소보다 두 배 늘어난 고지 금액을 보고 나서야 무엇이 문제인지 확인해 볼 생각이 들 것이다. 어쩌면 에어컨의 냉매가 새서 설정 온도를 맞추기 위해 두 배나 더 길게 돌았을 수도 있다.
이런 방식으로 정비하는 것을 통상적으로 ‘Run to Failure’ 정비방식이라고 부른다. 간단히 말해 문제점이 곪아 터져 결국 우리가 놓칠 수 없을 정도로 노골적인 신호를 보낼 때까지 기다리는 것이다.
이런 방식은 사용자를 꽤 불편한 상황으로 몰아넣는다. 사용자 입장에서는 잘 사용하던 장비나 기기가 예상치 못하게 고장 났기 때문에, 생산성이 떨어지거나 불편해지는 등 직접적인 문제가 생긴다. 직접 수리하든, 수리공을 부르든 이를 위해 시간도 할애해야 한다. 금전적으로도 이런 방식의 수리비용은 보통 비싸기 마련이다. 이미 증상의 근본 원인이 악화됐기 때문이다.
예를 들어 한 달 전이었다면 볼트와 너트를 조이면 됐을 헐거워진 마운트 문제가 알아차리지 못하는 사이 계속 악화되고, 결국 동작 중 떨어져 나와 모터 축 정렬(Alignment)을 망가뜨린 뒤 주변 전자장비까지 파손했다고 가정해보자. 뒤늦게 이를 알아차린 사용자에게는 이로 인한 금전적인 부담이 마치 갑자기 맞닥뜨린 재난 상황과도 같을 것이다.
이러한 갑작스러운 장비의 ‘사망선고’를 예방하기 위해 군이나 주요 기반시설과 같은 조금 더 통제되는 환경에서는 ‘주기적(Periodic)’ 정비가 대안이 될 수 있다. 이를 위해서는 물론 인력, 예산, 시간, 공간, 기기 등 추가적인 자원이 필요하다.
하지만, 주기적인 정비로도 정비 도중 모든 문제를 발견한다고 보증할 수는 없다. 정비 시 가까스로 발견되지 않은 문제들이 임무 수행 중 고장 난다면 이는 막을 수 없다. 더 큰 문제는 정비를 해야 할 기기 규모가 숫자와 금전적인 가치 기준으로 매우 커지면, 주기적인 정비를 위해 할당해야 하는 기기 다운타임(Down-time, 정비를 위해 기기 가동을 정지해야 하는 시간)이 얼마인지에 관계없이 극도로 과도한 비용 부담으로 이어진다는 점이다.
대당 수백억, 수천억 원에 달하는 값비싼 장비들이 100대 설치된 반도체 공장을 예로 들어보자. 장비당 1%의 다운타임을 정비를 위해 할당했다고 하면, 공장 레벨에서 볼 때는 1년 내내 99대만 가동되고 있는 것과 같다. 수백억 또는 수천억 원에 달하는 비용이 영원히 매몰비용으로 발생하는 것이다.
이에 더해 팬데믹으로 인해 전세계적으로 반도체 부족현상이 발생하고 있는 요즘과 같은 상황에서는 반도체 생산시설을 정비 목적으로 중단하는 결정이 가져올 손실 규모는 더 커진다. 기업 입장에서는 그만큼 사업 기회를 놓칠 수 있고, 사회적으로도 큰 손해와 부담을 감당해야 한다.
이처럼 반도체 기업, 군, 기반 시설 등에서 주기적인 정비를 대규모로 하는 것은 많게는 수조 원을 넘어갈 수도 있는 상상을 초월하는 매몰비용을 부담하겠다는 것과 같다. 이런 레벨에서 정비를 위한 다운타임을 없애기 위해 100억 원을 투자한다고 생각해보자. 그렇게 큰돈을 연구에 투자하는 것이 합당한지 잠깐 따져볼 수도 있겠지만, 이 연구가 가져올 가치를 생각해본다면 합당한 수준을 넘어 엄청나게 이득을 보는 투자가 아닐 수 없다.
이를 근본적으로 해결하기 위해 ‘상태 기준 정비(Condition-based Maintenance, 이하 CBM)’라는 패러다임이 인기를 얻고 있다. 이 방법은 ‘예측적(Predictive)’ 정비로 불리기도 한다. CBM은 장비의 상태를 지속적으로 관찰해 실제 고장이 일어나기 훨씬 이전에 고장을 예측해내는 방식이다.
이 방법은 센서를 통해 수집되는 데이터를 지속적으로 분석하고, 분석을 기반으로 장비에 관한 Actionable Health Information(기기의 작동 상태를 담은 정비 실행 여부에 관한 최종적이고 간결한 정보)를 생성하며, 이 정보가 의미가 있는 메시지라면 최종 결정권자에게 즉시 전송하도록 하는 구조를 갖고 있다.

▲(그림1) 각 정비방식 비교
이 방식은 Run to failure나 Periodic 정비와 비교하면, 장비의 신뢰성(Reliability)을 획기적으로 향상시킬 수 있다. 놓아두면 골치를 썩일 수 있는 문제점들을 전조가 보이지 않을 정도로 극초반에 발견하기 때문에, 기기가 다운타임을 필요로 할 확률이 극히 낮다. 예를 들어 볼트와 너트가 헐거워지는 문제의 경우 CBM을 활용하면 볼트가 조금만 헐거워져도 바로 발견할 수 있다. 이때는 해결방법이 볼트를 조이는 것으로 간단하기 때문에 수리에 필요한 시간이 매우 짧다. 또한 이때는 다른 부품이 마모되거나 손상되기 전으로, 수리에 필요한 금전적인 비용도 현저히 낮다. 고칠 것이 거의 없어 이를 위한 노동력 확보도 쉬워진다.
이에 CBM은 첨단 제조업(High-tech Manufacturing), 유조정(Off-shore Platform), 항공/우주 산업 등 ‘미션 크리티컬(Mission Critical, 절대 시스템이 다운되면 안 되는 하드웨어적 환경)’이 필요한 분야에서 주목받고 있다.
하지만 CBM을 활용하기 위해서는 기기의 상태를 ‘지속적으로’ 관찰해 데이터를 생성해야 한다. 또한 기기의 상태를 세밀하게 분석하려면 다양한 종류의 센서들이 다수 부착돼 ‘세밀한(Fine-grained)’ 데이터를 생성해내야 하는 경우가 많다. 따라서 센서를 통해 끊임없이 생성되는 아주 많은 양의 로우 데이터(Raw Data)를 관리/저장/전송해야 한다는 걸림돌이 있다. 또한 Actionable Health Information을 추출하기 위해 이 많은 데이터를 끊임없이 연산해야 한다는 것도 또 다른 걸림돌이다.
이렇게 고강도의 연산이 필요한(Computation-intensive) 대용량 데이터를 실시간으로 관리/연산하는 과정은 일반적으로 데스크톱 수준의 CPU/GPU, RAM, Data Storage 등 성능이 매우 높은 하드웨어를 필요로 한다.
소프트웨어 처리 이외에도 다른 큰 걸림돌이 있는데, 다수의 센서와 연산 자원을 물리적으로 설치할 수 있는 공간이 필요하다는 점이다. 보통 진동 센서 등을 관찰하려는 기기 안이나 곁에 설치하는 경우가 대부분인데, 이미 설치가 끝나 케이스가 씌워진 기기를 개조하거나(Retrofit), 이 기기에 매립하는(Integration) 것이 불가능한 경우가 많다. 또한 이것이 가능하더라도 이미 존재하는 기기의 기능을 침범하지 않게(Non-intrusive) 조심스럽게 센서와 연산 자원들을 추가하는 공간 디자인 작업 자체의 난도도 상당히 높다.
또한 전력과 네트워크의 공급도 CBM을 도입하는 데 걸림돌이 될 만한 중요한 문제다. 이와 관련해 아주 중요한 두 가지 질문이 있는데, 첫 번째는 ‘기기 개조 후 탑재될 센서들과 연산 자원들이 어떻게 전력을 공급받게 해야 할까?’이고, 두 번째는 ‘Actionable Health Information이 어떻게 최종 결정권자에게 도착하게끔 해야 할까?’이다.
Non-intrusive CPS 구축을 방해하는 가장 큰 걸림돌: 전력 공급
이러한 걸림돌들을 제거하기 위해 먼저 첫 번째 질문에 대해 생각해보자. 만약 주변에 손쉽게 접근할 수 있는 전력 콘센트(Power Outlet)가 있다면 별로 걱정하지 않아도 된다. 최근 우리가 탑재하고자 하는 센서들과 주변 관리/연산장치들을 합쳐 ‘가상물리시스템(Cyber-Physical System, 이하 CPS)’이라고 부르기 시작했는데, 이는 기존에 센서 노드(Sensor Node, 물리적인 현상을 관측하기 위해 데이터를 수집하는 기능과 통신 기능을 탑재한 소형 장치), 임베디드 시스템(Embedded System, 특정 제품이나 솔루션에서 주어진 작업을 수행할 수 있도록 추가로 탑재되는 솔루션이나 시스템), 사물인터넷(Internet of Things) 등으로 불리던 시스템이다.
전력 공급을 위해서는 CPS의 어댑터(Adapter)를 콘센트에 꽂아 사용해야 하는데, 특정 전동기기에 부착돼야 하는 만큼 CPS부터 벽에 설치된 콘센트까지 몇 피트(ft) 혹은 몇 미터(m) 길이의 전선을 외부에 깔아야 한다. 이는 보기에도 좋지 않겠지만, 기존 공간에 다양한 리스크를 가져온다는 것이 더 큰 문제다.
일단 그 전선이 벽 뒤나 땅속에 매립돼 있지 않고 밖에 나와 있어 기계적으로 움직이는 전동기기의 특성상 그 전선과의 물리적인 상호작용에 의한 물리/전기적 안전에 신경 써야 한다. 또한 CPS가 기존 전동기기(Host System)의 교류 전력망(AC Grid)에 물리게 되면, 다양한 작업을 하는 CPS 특성상 간섭(Noise)이 우려된다. 또한 대부분의 CPS가 무선 네트워크(Wireless Network)로 연결되는 것을 지향해, 보안 우려도 발생한다. 긴 선과 무선 커뮤니케이션에서 생겨나는 EMI(Electro Magnetic Interference, 전자 방해 잡음)도 당연히 걱정거리가 된다.
이러한 이유 때문에 개조 용도의 CPS는 대부분의 경우 전력망 사용(Grid Access)에 대한 허가가 나지 않아 전력적으로 각자도생하는 방법을 찾게 된다. 그렇다면 어떻게 기존 인프라에 영향을 미치지 않고(Non-intrusive) 전력을 공급할 수 있을까?
이를 위해 아주 큰 배터리 팩을 사용하는 것을 매력적인 솔루션이라고 생각할 수 있다. 하지만 CPS는 배터리만으로 유지할 수 있는 솔루션은 아니다. 이를 교체하거나 충전하기 위한 주기적인 정비가 결국 필요해지기 때문이다.
남는 방법은 자체 전력수급(Self-powering) 메커니즘을 사용하는 것이다. 이 방법으로는 무선전력전송(Wireless Power Transfer, 이하 WPT)과 에너지 하베스팅(Energy Harvesting, 자연적인 에너지원으로부터 발생하는 에너지를 전기 에너지로 전환하는 기술)이 있다.
WPT는 용량성(容量性, Capacitive) 기반이든, 유도성(誘導性, Inductive) 기반이든 관계없이 킬로와트(kW) 수준의 상당히 높은 전력 레벨까지 무선으로 전송할 수 있다. 하지만 이를 위해 기기가 연결된 기존 전력망(Host Grid)에 설치할 전용 송신기(Dedicated Transmitter)가 필요한데, 전선과 어댑터를 추가하는 것보다 훨씬 더 많은 공간이 필요하다.
따라서 Host Grid나 System 내에 WPT를 위한 회로 및 인터페이스가 설치돼 있지 않다면, WPT는 결코 매력적인 솔루션이 될 수 없다. 특히나 모니터링 용도로 사용되는 CPS는 대부분 밀리와트(mW)에서 와트(W) 수준의 낮은 전력을 사용하기 때문에, 높은 전력 레벨까지 출력이 가능한 WPT의 특성은 큰 장점이 되지 못한다.
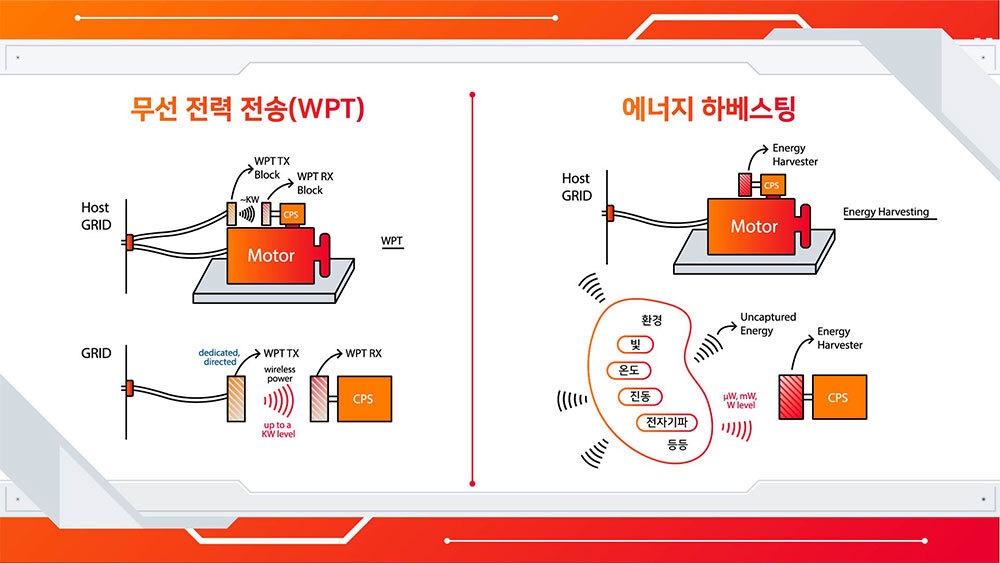
▲(그림2) 무선전력전송(WPT) vs 에너지 하베스팅
에너지 하베스팅은 빛, 온도, 전자기파, 진동과 같이 주변 환경에 이미 존재하는 에너지원에서 더 수동적인 태세로 에너지를 추출할 수 있다. 따라서 전기적인 설치나 연결 문제가 자연스럽게 사라진다.
하지만 전용 송신기가 없어 에너지 교환이 최적화돼 있지 않기 때문에 추출되는 전력과 에너지 밀도가 굉장히 낮다. 결국 CPS에 에너지 하베스팅을 위해 큰 인터페이스를 설치해야 하는 결과를 초래한다. 또한 하베스팅의 에너지원이 동작 환경에 제한을 걸 수도 있다. 예를 들면, 태양광(Photo Voltaic, PV)이나 바람의 경우 실외 설치 후 운영하는 경우가 대부분이며, 그렇지 않으면 추출되는 전력/에너지 밀도가 극단적으로 감소한다.
다양한 에너지 하베스팅의 에너지원과 이를 사용해 100mW의 CPS를 만든다고 가정할 때 필요한 인터페이스의 넓이와 크기에 대한 정보가 아래 표에 정리돼 있다. 100mW는 모니터링 용도의 CPS에서 적절하고 합리적인 전력 사용량으로 가정할 수 있는 수치다.
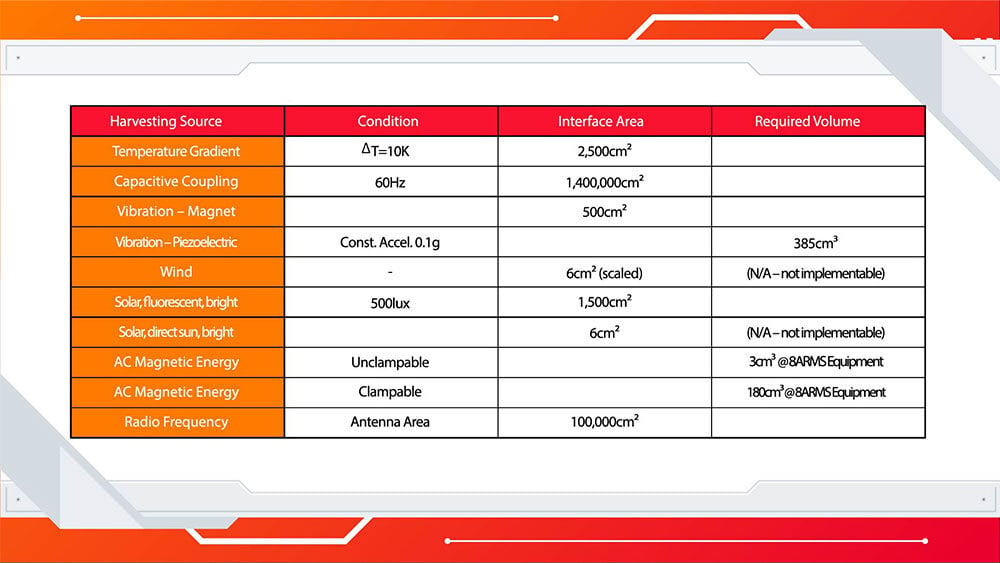
▲(표) 하베스팅 에너지원과 100mW 추출을 위한 인터페이스 크기
우리가 주변에서 접하는 전압 레벨에서 전선을 통해 100mW를 공급하기는 아주 쉽다. 주변에서 쉽게 찾을 수 있는 그 어떤 전선도 100mW 정도는 전혀 문제가 되지 않는다. 예를 들어 USB 충전 케이블만 하더라도 최소 5W, 즉 최소 5,000mW를 보내면서 대부분 열조차 나지 않는다. 하지만 에너지 하베스팅으로 힘들게 100mW를 생성하는 것의 진정한 장점은 CPS가 외부 전력원과 전선 구조에서 자유로워져 CPS의 ‘설치 장소’에 대한 제한이 없어진다는 점이다.
태양광 셀만으로도 전력이 확보되는 외부 방범 카메라를 생각해보자. 일단 주변 콘센트까지 긴 전선을 늘어뜨려야 할 필요가 없어, 이와 관련된 모든 리스크가 사라진다. 콘센트가 외부에 노출된 상태라면 여기에 꽂을 어댑터도 비, 습도, 자외선 등 외부 환경에 충분히 대비돼 있는지 걱정해야 한다. 만약 외부 콘센트가 없다면 실내에서 벽에 구멍을 뚫고 전선을 설치한 후 구멍을 메우고 단열 작업을 하는 과정이 필요하다. 방수/방열 처리된 전선도 필수다. 하지만 태양광을 사용하므로 이런 문제에서 자유로워질 수 있다. 유일한 문제는 태양광 패널/셀을 사용할 경우 실내에서는 이와 같은 운영이 불가능하다는 점이다.
대부분의 경우 실내에 존재하는 전동기기들을 위해 CPS를 운영하고 싶은 우리의 입장에서는 어떤 에너지 하베스팅이 적당할까? 예를 들어 반도체 팹(FAB)에서 물류 이송을 담당하는 장비인 OHT(Overhead Hoist Transfer)에 들어가는 전동기기를 모니터링하고 싶다고 가정하자. 앞서 표에서 소개한 에너지 하베스팅 방식 중 압전(Piezoelectric)을 활용한 하베스팅 방식, 자석 기반의 진동 에너지를 활용한 하베스팅 방식, 교류 전류(AC) 자기장 기반의 하베스팅 방식 등을 꼽을 수 있다.
압전을 활용한 하베스팅 방식은 특수한 물질을 사용한다. 이 물질은 양쪽에 압력을 가하면 압력에 따라 양쪽 표면에 전압이 유도되는 성질을 갖고 있는데, 전동기기가 진동하면서 순간적인 압력을 이 물질의 한쪽 표면에 더 가하거나 덜 가하게 되면 양쪽 표면에 전압이 유도된다. 이 전압에 부하 장치(Load)나 에너지 저장장치를 연결해 회로를 완성하면 전력(에너지)이 추출된다.
자석 기반의 진동 에너지를 활용한 하베스팅은 단단한 물질로 만들어진 탄성 있는 구조의 끝에 영구자석을 고정해 기본 틀을 마련한다. 이후 전동기기 자체나 전동기기의 설치 평판에 단단히 고정한다. 이때 전동기기가 진동하거나 움직이면 이 금속 구조와 영구자석이 같이 진동하거나 움직이게 되는데, 특히 영구자석의 끝이 많이 움직이게끔 구조의 탄성을 디자인하면 높은 에너지를 끌어낼 수 있다. 영구자석의 끝이 진동으로 인해 탄력적으로 움직이는 도중에는 그 바로 앞에 있는 공간의 자기장 세기가 계속 바뀌는데, 이 앞에 코일을 배치한다면 자기장의 시간적 변화를 맥스웰 방정식1) 중 ‘패러데이의 법칙’2)에 따라 전압으로 전환할 수 있다. 이때 유도되는 전압 양단에 부하 장치나 에너지 저장장치를 연결함으로써 에너지를 추출한다.
1) Maxwell’s equations: 전자기 현상의 모든 면을 통일적으로 기술한 전자기학의 기초가 되는 방정식.
2) Faraday’s law: 전기가 통할 수 있는 루프(Loop)의 면에 수직으로 자기선속(Magnetic Flux)을 통과시키면 루프에 전압이 유도된다는 법칙.
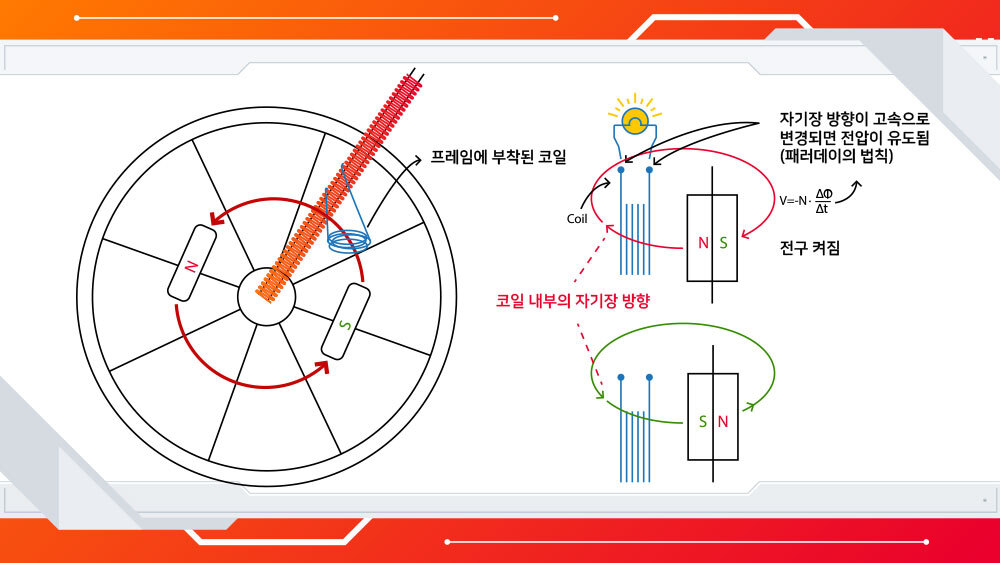
▲(그림3) 배터리 없이 바퀴를 굴려 빛을 내는 자전거 LED
자전거 전조등 혹은 자전거 바퀴에 장착하는 LED 중 배터리 없이 바퀴를 굴려 빛을 낼 수 있게 하는 것들이 있는데, 그들 중 일부는 그림3과 같이 이 하베스팅의 개념과 유사하게 영구자석과 물리적인 움직임, 그리고 코일을 이용해 에너지를 공급한다.
AC 자기장 기반의 에너지 하베스팅은 전동기기의 전력선 주위에 생겨나는 AC 자기장을 흡수해 에너지를 획득한다. 어떤 전동기기든 동작하면서 AC Grid에서 전력을 끌어 쓸 때는 전류가 흐른다는 말과 같고, 이 AC 전류는 AC 자기장을 수반할 수밖에 없다. 이 AC 자기장을 내뿜는 전력선 주위에 유도선(Winding)을 감은 마그네틱 코어(Magnetic Core, 자성 물질)로 전자기장 결합(Coupling)을 유도하면 자기장의 에너지를 전류/전압 등의 형태로 추출할 수 있다.
물리적인 구조는 일반적인 변압기(Transformer)와 흡사한데 마그네틱 코어가 주기적으로 심하게 자성포화3)되는 어려움이 있어 이를 해결하는 기술이 필요하다. 이 하베스팅 방식은 ‘전동기기를 관찰해야 하는 동작 도중’ 이라는 이벤트가 하베스팅 기회와 완벽히 겹치기 때문에 효율적인 스케줄링이 가능하고 하베스팅 회로 설계에 있어 여러 이점을 확보할 수 있다. 또한 아주 가끔 임의로 발생하는 다른 환경에너지원들의 에너지 버스트(Energy Burst, 순간적으로 집중돼 고밀도로 발생하는 에너지)와는 달리 전동기기의 스케줄에 따라 보다 안정적으로 뿜어져 나오는 자기장 에너지에 의존하기 때문에 하베스팅 인터페이스의 부피를 과감하게 줄일 수 있고 이로 인해 하베스팅의 전력밀도(Power Density)도 다른 방법들에 비해 굉장히 높은 편이다. 물리적인 진동에 의존하지 않기 때문에 물리적인 고장이 날 부품이 적다는 것도 장점이다.
3) Magnetic Saturation: 자화력이 증가하며 자속 밀도도 증가하다가 어느 점에 이르면 그 밀도가 더 이상 증가하지 않는 현상.
어떤 하베스팅 방법을 선택하든 하베스팅을 위해 충분히 큰 인터페이스 크기를 감수하거나 에너지 하베스터의 전력 생산보다 낮은 레벨로 부하를 설계하는 하는 방법으로 CPS를 전력/에너지 관점에서 아주 자유롭게 만들어줄 수 있다. 이는 요즘 글로벌 트렌드인 ESG(Environmental, Social, Governance)와도 잘 어울린다.
Non-intrusive CPS 구축을 방해하는 또 다른 걸림돌: 네트워킹
이번엔 다수의 CPS가 다수의 전동기기에 설치되었을 때 나타나는 시스템 레벨의 걸림돌인 네트워킹에 대해 다뤄보려 한다. 다수의 CPS가 최종결정권자와 통신할 수 있는 가장 쉬운 방법은 공장에 설치된 Wi-Fi와 같이 이미 존재하는 네트워크 기반시설을 사용하는 것이다.
하지만 때로는 이미 구축된 네트워크에 대한 접근이 불가능한 경우도 있다. 예를 들어 군이나 전력망과 같은 중요한 기반시설에서는 보안과 관련된 이유로 외부 네트워킹 기기가 기존 네트워크에 접근하는 것이 허용되지 않는다.
어떤 환경에 놓이더라도 CPS와 최종결정권자 사이의 메시지 채널을 가장 확실하게 보장할 방법은 독립적으로 전력을 생산하는 하베스팅과 비슷하게 CPS들만을 이용해 독립적인 네트워크를 구축하는 것이다.
가장 합리적인 방법은 CPS로 전체 또는 일부라도 메시 네트워크(Mesh Network, 그물망 형태로 구축된 네트워크 구조)를 구축하는 것이다. 전동기기와 이에 부착되는 CPS는 한 곳에 몰려 있지 않고 공장이나 시설 전체에 넓게 퍼져 있을 확률이 높기 때문이다.
이때 에너지 하베스팅까지 고려해 메시 네트워크를 생각해보면 재미있는 문제가 발생한다. ‘한 CPS에서 최종결정권자까지 어떻게 메시지를 전달(Route)할 것인가?’라는 문제다. 메시지가 중간에 거쳐야 할 CPS도 에너지 하베스팅을 사용하기 때문에 이들이 켜져 있을지 알 수 없다는 것이 문제의 핵심이다.
반도체 팹을 예로 들어보자. 수백 개의 전동기기와 여기에 설치된 CPS가 팹 곳곳에 넓게 퍼져 있다고 가정해보자. 이 펌프(Pump), 액츄에이터, 제너레이터 등의 전동기기들은 다른 시간대에 다른 지속시간 동안 동작할 것이다. 결국 모니터링을 하거나 중단하는 CPS의 패턴이 전부 다르게 설정돼 있고, 이에 따라 에너지 하베스팅이 진행되는 시간대도 전부 다를 수밖에 없다. 자체적으로 전력을 공급하는 수백 개의 CPS가 각자의 페이스와 에너지 저장상태에 따라서 불규칙하게 켜졌다가 꺼지고 있는 것이다. 어느 한 CPS가 최종결정권자에게 보낼 중요한 정비 메시지를 방금 생성했다고 가정해보자. 이때 다른 CPS들 중 어느 CPS들이 작동하고 있는지에 따라, 또는 어떤 루트를 통해 메시지를 전달하는지에 따라 이 메시지가 최종결정권자에게 도달하지 못할 수도 있다. 만약 현재 도달이 불가능하다면 이 메시지는 생성됐던 CPS보다 더 빠른 미래에 최종결정권자에게 닿을 수 있는 CPS로 옮겨져 임시로 저장돼야 한다.
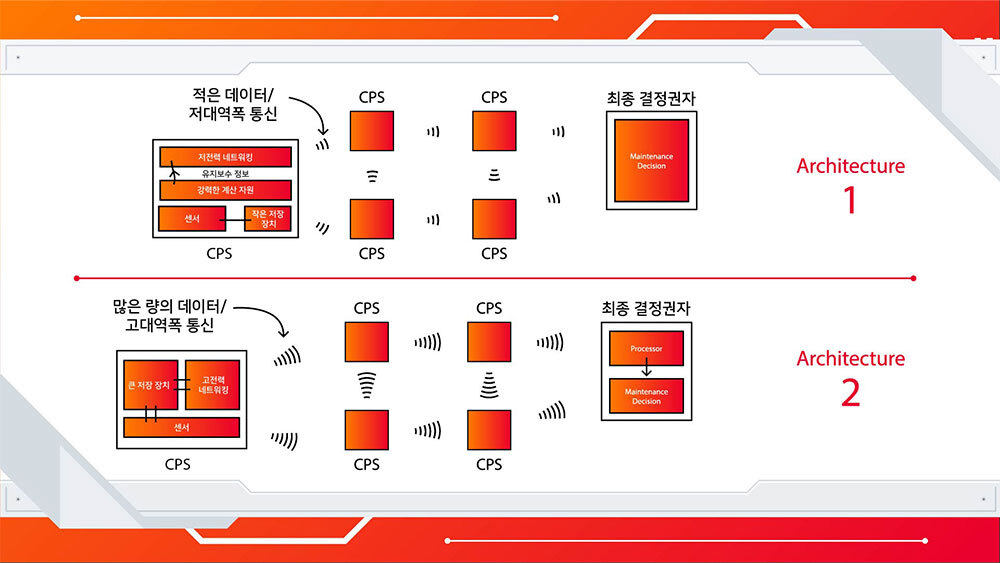
▲(그림4) CPS의 두 가지 아키텍처
우리가 던져야 할 다음 질문은 ‘CPS의 메시지에는 어떤 정보들이 담겨 있는가?’이다. 이는 CPS의 아키텍처(Architecture)와 데이터 구조를 아우르는 질문이다.
보통 CPS는 두 가지 아키텍처 중 하나로 설계가 된다. 하나는 강력한 연산능력을 기반으로 기기의 상태를 자체적으로 진단해 ‘짧은’ 메시지를 생성하고, 저전력 저대역폭 통신망을 사용해 메시지를 전송하는 아키텍처다. 또 하나는 최소한의 연산만 하거나 연산 없이 센서에서 확보한 로우 데이터에 가까운 ‘긴’ 메시지를 생성하고, 고전력 고대역폭 통신망으로 메시지를 전송하는 아키텍처다.
첫 번째 아키텍처는 BLE(Bluetooth Low Energy)와 같은 저전력 저대역폭 통신 프로토콜을 사용하면서 통신에 들어가는 전력을 아끼고, 대신 강력한 연산을 하는데 고전력을 소비한다. CPS 내부에서 기기의 상태에 대한 연산과 진단이 이뤄지기 때문에, 고장이 없는 정상적인 전동기기의 경우 ‘아예 최종결정권자에게 보낼 메시지를 생성하지 않는다’는 판단도 가능하다.
두 번째 아키텍처는 연산에 들어가는 전력을 아끼는 대신, 많은 데이터를 빠르게 전송할 수 있는 통신방식을 활용해 긴 메시지, 즉 많은 양의 데이터를 전송하는 데 고전력을 소비한다. 이 아키텍처는 CPS 내부에서 기기의 상태에 대해 연산하거나 진단을 내릴 수 없어, 실제 전동기기의 상태와 상관없이 확보한 로우 데이터 전부를 무조건 전송해야 한다. 즉, 최종결정권자에게 분석/연산/진단에 대한 자원적/시간적 부담이 지워지는 것이다.
일반적으로 이 두 옵션은 각자의 확실한 장점이 있다. 하지만 수백 개의 CPS들이 동시에 독립적으로 로우 데이터를 생성해낼 수 있는 경우에는 첫 번째 아키텍처가 훨씬 효율적이다. 수백 개의 CPS가 끊임없이 엄청난 양의 로우 데이터를 최종결정권자에게 전송한다면 Gbps4)를 지원하는 Wi-Fi라 할지라도 이를 수용하기 힘들 것이다.
4) Gbps: 1초에 얼마나 많은 양의 정보를 보낼 수 있는지를 나타내는 단위. 1Gbps는 1초에 약 10억 비트의 데이터를 보낼 수 있다는 것을 의미함.
또한 앞에서 살펴본 것과 같이 에너지 하베스팅 때문에 중간 CPS에 임시로 데이터들을 저장하는 경우가 생길 수 있는데, 이 경우 메시지가 짧을수록 각 CPS 내부에 마련해야 하는 데이터 저장장치의 크기를 줄일 수 있다. 로우 데이터 전체를 저장해야 하는 두 번째 아키텍처의 경우 각 CPS마다 기가바이트(Gigabyte) 혹은 테라바이트(Terabyte) 수준의 데이터 저장장치를 구비해야 할 수도 있다. 그렇게 되면 이 CPS는 더 이상 모니터링 용도의 간단하고 작은 CPS라고 할 수 없을 것이다. 결론적으로는 ‘짧은’ 메시지를 생성할 수 있는 강력한 연산장치를 탑재한 첫 번째 아키텍처를 선택하는 것이 합리적이다.
또 하나의 걸림돌: 장비 작동상태 진단 및 네트워크 루트 설정에 필요한 연산
끊임없이 쏟아져 나오는 진동, 온도, 전기 센서 데이터에서 기기의 작동상태를 유추하려면 굉장히 복잡한 수학적 계산을 해야 한다. 또한 수백 개의 CPS에 대한 여태까지의 On/Off 기록을 기반으로 최적의 메시지 전달 경로를 계산하는 것과 현재 최종결정권자까지 메시지 전달이 불가능할 경우 메시지가 임시 저장될 최적의 CPS 위치를 계산하는 것도 복잡한 수학적 연산이 필요하다.
이는 강력한 CPU 또는 GPU, 많은 양의 RAM, 그리고 빠른 데이터 저장장치를 갖춘 컴퓨터로도 수 초에서 수십 초 정도 걸리는 실시간 연산인데, 이런 컴퓨터나 연산장치들을 갖추는 데에는 수백만 원 혹은 그 이상의 비용이 들어간다. 연산 도중의 순간전력도 최소 수백W에서 최대 kW까지 치솟을 수 있다. 이러한 우리 주위의 연산장치의 조건들을 따져본다면 mW에서 W 수준을 목표로 하는 조그마한 CPS로는 현실적으로 이 같은 계산을 수행하기가 힘들 것으로 예측할 수 있다.
하지만 최근 주목받고 있는 인공지능(Artificial Intelligence, AI)과 신경망(Neural Network, NN) 소프트웨어 기술을 등에 업고 이러한 걸림돌을 해결해보려는 연구 결과들이 나오고 있다.5) 이러한 연구결과에 따르면 ‘작은 CPS에서도 앞에서 언급한 수준의 연산능력을 구현하는 것이 가능하다’는 결론이 도출되기 시작한다. 수백W 대신 수백mW 수준의 소비전력(1/1000 수준의 전력)으로도 동일한 연산을 할 수 있다는 것이 핵심인데, 이는 AI와 NN 알고리즘이 트레이닝을 통해 정석대로라면 꼭 수행해야 했을 복잡한 수학 연산들을 직접 풀어내지 않고도 같은 답을 낼 수 있기 때문이다.
5) 참고자료:
S. Kang, J. Moon and S. Jun, “FPGA-Accelerated Time Series Mining on Low-Power IoT Devices,” 2020 IEEE 31st International Conference on Application-specific Systems, Architectures and Processors (ASAP), 2020, pp. 33-36, doi: 10.1109/ASAP49362.2020.00015.
J. Chen, S. Hong, W. He, J. Moon, S. Jun, “Eciton: Very Low-Power LSTM Neural Network Accelerator for Predictive Maintenance at the Edge,” The International Conference on Field-Programmable Logic and Applications (FPL) 2021.
물론 이러한 AI와 NN 엔진을 만들어 내기 위한 초기 단계에는 많은 양의 연산과 데이터가 필요하다. 하지만 구현 후 실제 사용될 때는 아주 비싸고 강력한 연산장치 없이도 극히 높은 확률로 같은 답을 낼 수 있게 된다. 따라서 더 이상 CPS에 수백만 원 또는 그 이상의 고가 연산장비가 필요하지 않게 되고, FPGA6), 마이크로컨트롤러7) 등 수만 원 또는 그 이하의 아주 쉽게 구할 수 있는 저가 연산장비(1/100 수준의 비용)로도 우리가 원하는 상태 진단 및 네트워크 루트 설정에 필요한 연산을 완료할 수 있다.
데스크톱 컴퓨터와 같은 일반 연산장비의 경우 높은 전력을 처리하기 위해 전력공급장치와 냉각시스템과 같은 큰 주변장치들이 추가로 필요하지만, AI와 NN 덕분에 그런 것들이 불필요해지면서 작은 CPS 크기 안에서 연산장치를 구현할 수 있게 된다.
6) FPGA(Field Programmable Gate Array): 프로그램이 가능한 비메모리 반도체의 일종.
7) Microcontroller: 프로세스를 좁은 범위 내에서 정밀하게 제어하는 장치.
앞서 소개한 연구에서는 고도로 타깃에 최적화된 Edge Computation Device(데이터가 수집되는 물리적 위치에서 연산이 이뤄지는 분산 컴퓨팅 기기)를 만들었는데, 이를 FPGA로 구현했다. 이 Edge Computation Device는 연산속도가 아주 빠르고 소비 전력도 굉장히 낮은데, 그 이유는 전동기기의 상태 진단에 관련된 연산만 하는 고도로 최적화된 AI 와 NN 알고리즘만 탑재돼 있기 때문이다. 데스크톱이나 랩톱 컴퓨터의 CPU와 같이 모든 작업에 적당한 성능을 내어주는 다재다능한 하드웨어가 아닌 특정 작업에만 최적화돼, 연산을 최소 수준으로 수행하는 하드웨어이기 때문에 소비 전력도 낮다. 결국 응용 프로그램(Application)을 특정하는 대가로 연산성능, 소비전력, 비용절감 등 모든 부분을 크게 개선할 수 있었다.
이 기술의 응용 분야와 효과는 무궁무진하다. 작은 CPS에서는 불가능할 것으로 여겨졌던 연산능력 확보 문제가 드디어 우리가 해결할 수 있는 레벨의 문제로 내려왔다는 데 큰 의의가 있다.
지금까지는 앞서 소개한 첫 번째 아키텍처가 전력공급량이 mW 수준에 머무는 동안에는 구현하기가 굉장히 어려웠지만, 이제는 거의 모든 센서 응용 프로그램에서 고려해볼 만한 아키텍처가 됐다. 또한 데이터 필터링(Data Filtering), 신호처리(Signal Processing), 압축/해제, 지능형 네트워크 루트 설정 등과 같은 작업들이 CPS의 미미한 전력 및 비용 증가로 구현할 수 있게 됐다. 이를 통해 특정 응용 프로그램에서는 컴퓨터와 비슷한 수준의 연산능력을 보이면서(Self-complete), 배터리 없이 에너지 하베스터만으로도 무한히 전력을 공급받을 수 있는(Self-powered) CPS를 구현할 수 있게 됐다. 이 같은 진정한 의미의 ‘Smart CPS’는 앞으로 CBM를 구현할 필수요소로 쓰이게 될 것이다.
AI와 신경망 소프트웨어 기술은 현재 예상치 못한 방식으로 어려운 엔지니어링 문제들을 해결해가고 있다. 최근 반도체 기술의 발전은 컴퓨팅 성능과 메모리 용량의 폭발적인 향상을 낮은 비용으로 가능케 하면서 이러한 소프트웨어 기술의 혁신과 연구들을 근본적으로 뒷받침하고 있다.
앞으로도 SK하이닉스를 포함한 반도체 제조업체들은 △HBM, GDDR6+, DDR5, LPDDR5, LPDDR4 등 고속/대용량 DRAM △ 다층 4D 낸드플래시, 이를 활용한 SSD, SD card와 같은 저장장치 솔루션 등 신경망 구현에 사용될 방대한 데이터를 저장할 수 있는 스토리지 △초고속 프로세서 등 AI 소프트웨어 기술들이 끊임없이 요구하는 더 빠르고 넉넉한 하드웨어를 제공하기 위해 더 분주하게 움직일 것이다.
※ 본 기사는 기고자의 주관적 견해로, SK하이닉스의 공식입장과는 다를 수 있습니다.



