
로봇과 자동차, 두 가지 판타지를 훌륭하게 충족시켰던 영화 <트랜스포머>(2007). 영화 속 옵티머스 프라임이나 범블비 등은 모두 외계생명체이지만, 겉보기엔 완벽한 로봇 그 자체였죠. 특히 자동차, 탱크, 헬리콥터 등으로 화려하게 변신하는 모습은 전 세계 수많은 덕후를 양성하기도 했습니다. 그리고 오는 크리스마스, 트랜스포머의 마스코트 범블비가 영화 <범블비>로 우리 곁을 찾아온다고 하는데요. 한 번쯤 상상해보았을 겁니다. 로봇기술이 진화해 멀지 않은 미래에 변신로봇 범블비와 마주하게 된다면, 그리고 그가 우리를 지켜줄 수 있다면? 범블비를 맞이하기에 앞서 상상만으로도 설레는 이 장면이 과연 현실에서도 펼쳐질 수 있을지 알아볼까 합니다.
로봇기술의 진화
로봇의 일반적인 의미는 ‘주어진 일을 자동으로 처리하거나 스스로 작동하도록 만들어진 기계(machine)’입니다. 체코어 중에 ‘robota’라는 단어가 있는데 이는 ‘일한다(work)’는 의미를 내포하고 있습니다. 로봇이라는 개념은 여기서 파생된 것이라고 볼 수 있습니다.
사실 로봇의 종류는 매우 다양합니다. 자동차와 같이 부품을 조립하고 생산해내는 산업 분야의 로봇부터 실생활에서 볼 수 있는 로봇 청소기나 왓슨과 같은 의료용 기기에 이르기까지 무궁무진하죠.
4차 산업혁명의 키워드 중 ‘로봇’ 기술은 빼놓을 수 없는 핵심 분야입니다. 국내외로 양산되고 있는 산업형 로봇은 어쩌면 일부에 불과할 수도 있습니다. 사람의 형태를 기본 구조로 갖추고 여기에 손과 발이 자유자재로 움직일 수 있도록 구현한 뒤, 작고 미세한 수천 가지의 고성능 센서를 달면 우리가 상상했던 ‘로봇’의 형체가 드러납니다. 물론 여기엔 인공지능이 탑재돼야 하고 사람의 육성 명령을 듣고 움직일 수 있어야 영화 속의 전형적인 ‘로봇’의 모습이 되겠죠. 익히 알려져 있는 것처럼 기업이나 대학에서도 로봇을 만들어 산업분야에 배치시키기도 했고, 경진대회를 통해 가능성과 미래를 엿볼 수 있었습니다.
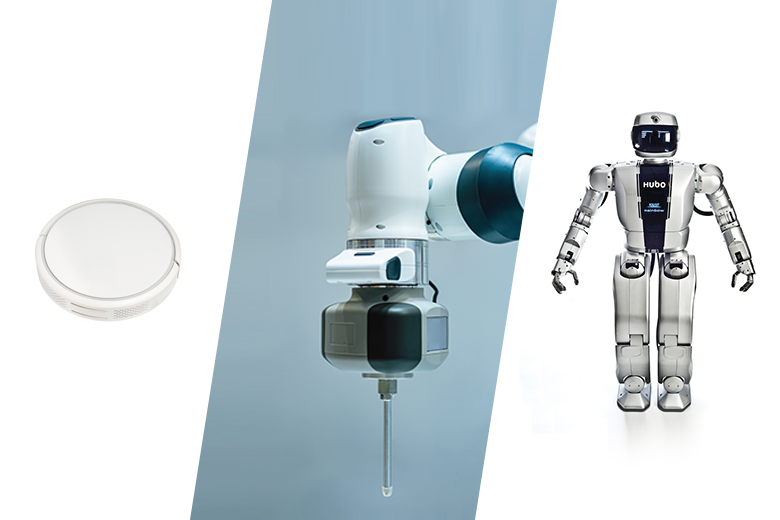
▲HUBO (출처: 유튜브 채널 HuboLab KAIST)
국내 최초의 인간형 로봇은 과연 무엇일까요? 2004년 카이스트에서 개발한 ‘휴보(HUBO)’가 대표적인 사례 중 하나인데요. 휴머노이드(Humanoid)와 로봇(Robot)이라는 단어가 합쳐진 이름처럼 직립보행이 가능하고, 손가락을 움직일 수 있어 ‘가위바위보’도 가능했습니다. 당시엔 매우 획기적인 기술로 구현한 모델로 인정받았습니다.
정부에서도 로봇산업 진흥을 위해 2008년 로봇산업특별법을 제정했으며, 현재는 4차 산업혁명 특별위원회가 바통을 받아 지속적으로 추진 중인 산업 분야입니다. 광운대와 부산 동명대, 안성 한경대, 경남 함안의 경남로봇고등학교까지 인재 양성 또한 활발하게 진행 중입니다.




민간기업 역시 로봇 분야에 적극적으로 나서고 있습니다. 네이버의 자회사인 네이버랩스(NAVER LABS)는 자율주행차뿐 아니라 로봇 개발에도 인력과 투자를 아끼지 않고 있습니다. 네이버가 약 2년 전 콘퍼런스에서 시범으로 선보인 어라운드(Around)와 에어카트(Aircart)는 실생활에서 편리하게 이용할만한 로봇의 가치를 품고 있습니다. 실내 공간을 스스로 감지하고 움직이며 현재 위치에서 정해진 위치로 이동이 가능합니다. 이를테면 병원에서 차트를 배달하거나 부피가 크지 않은 의료 도구를 운송할 때, 대형 서점에서 무거운 책을 옮길 때 등 우리 생활 전반에서 다양하게 활용될 수 있습니다.
전동카트의 경우에는 ‘근력 증강 웨어러블 로봇기술(pHRI, physical Human-Robot Interation)’이 탑재되었습니다. 카트에 일반적으로 달려있는 손잡이를 사람이 쥐고 있을 때 사용자가 얼마만큼의 힘을 부여하고 있는지 ‘힘 센서’가 이를 측정하고 의도를 파악해 움직입니다. 경사가 높은 곳으로 카트를 밀고자 하면 그 힘을 파악해 카트가 움직이고, 내리막에서는 카트를 조금 더 세게 잡아 아래 방향으로 굴러가지 않도록 자동 브레이크 시스템이 작동하는 원리입니다.
범블비에게 필요한 IT 기술은?



다시 <트랜스포머>로 넘어가 보겠습니다. 범블비가 외계 생명체가 아닌 인공적으로 구현한 로봇이라고 가정했을 때, 그에게 필요한 기술은 무엇일까요? 먼저 기본적으로 거리와 주변 환경을 측정할 수 있는 센서가 필요할 텐데요. 자동차의 모습이 되었을 때 자율주행이 가능해야 하기 때문에 ‘라이다(Lidar)’와 같은 거리 측정 센서가 필수적으로 탑재돼야 할 것입니다. 손과 발이 자유자재로 움직일 수 있도록 하는 작은 모터와 사람의 말을 알아듣고 실행하는 인공지능도 포함되어야겠죠. 다만 1분도 채 되지 않는 시간에 로봇에서 자동차, 자동차에서 로봇으로 변하게 하려면 매우 유연해야 하는데 현실에서 완벽히 구현될지는 미지수네요.
위에서도 언급했듯, 로봇에게 있어 가장 중요한 것은 센서입니다. 굳이 트랜스포머가 아니더라도 대다수 산업 분야에 널리 퍼져있는 로봇들이 고도의 작업을 수행하려면 적절한 센서(Sensors for robot)가 들어가야만 합니다. 대상 인식도 중요하지만 로봇의 내부 상태도 파악할 수 있는 센서 등이 포함될 수 있는데요. 통상 로봇에는 내부 상태 조건을 파악하기 위한 내계 센서(Internal sensor)와 외부 환경을 측정하고 파악하는 외계 센서(External sensor)가 탑재될 수 있습니다.
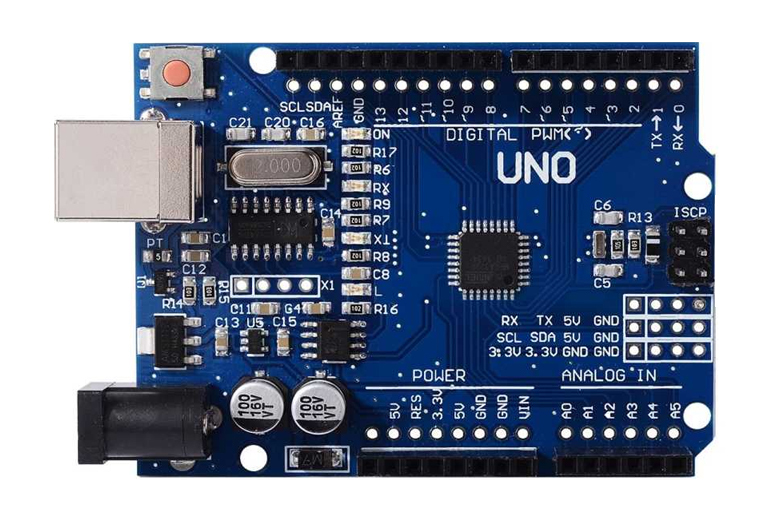
▲아두이노 우노 기판 (출처: robotistan.com)
로봇의 근본적인 명령 수행은 컴퓨터와 흡사하다고 가정해볼 수 있습니다. 이러한 가정 아래 컴퓨터가 명령을 수행해 작동할 수 있도록 하는 메인보드, 그리고 여기에 연결된 각종 처리 장치들은 아두이노(Arduino)가 기반이 될 수 있습니다. 여기서 아두이노란 다양한 센서들과 부품 등을 연결할 수 있으며 입출력 및 중앙처리장치가 포함되어 있는 일종의 기판을 의미합니다.
하늘을 비행하는 드론(Drone)이 리모트 컨트롤러로 움직인다고 봤을 때, 리모컨의 버튼은 곧 명령이 됩니다. 그리고 드론의 날개나 방향타에 신호를 주어 이를 수행하게 하는 통제 장치가 바로 아두이노의 역할입니다. 아두이노의 기판을 보면 가운데 ‘Made in Italy’라고 적혀있는데, 최초의 아두이노 역시 이탈리아 이브레아(Ivrea)에서 시작되었다고 전해집니다. 하드웨어에 대해 잘 알지 못하는 일반인들도 프로그램 작성이 가능하면서도 가격이 저렴한 보드가 필요했죠. 이러한 니즈를 충족시키기 위해 여러 사람들이 접근 가능하도록 오픈소스형(개방형) 아두이노 하드웨어와 소프트웨어가 개발되었다고 합니다.
영화 <터미네이터>에서도 머리에 탑재된 칩이 컴퓨터의 CPU와 같이 매우 중요한 역할을 수행하는 듯 암시되는 부분이 있었습니다. 지금 가장 기초가 되는 아두이노가 세월이 지나면서 고도화되었을 것이고, 나아가 로봇이나 자동차, 드론 등에 중요한 부품이 되어 전체를 움직이고 통제하는 역할을 했을 것으로 보입니다.
범블비가 외계로부터 유입된 점을 차치한 채 온전한 로봇으로 바라본다면 위에서 언급된 다양한 기술들과 정밀하고 정교한 부품들이 녹아들어 있다고 볼 수 있습니다. 아직은 가야 할 길이 멀고 또 험난할 순 있겠지만, 로봇산업에 대한 투자와 개발이 지속되고 있는 만큼 언젠가 우리 삶 속에서 범블비와 같은 귀여운 친구와 함께 할 날이 오지 않을까 감히 생각해봅니다.
※ 본 칼럼은 반도체/ICT에 관한 인사이트를 제공하는 외부 전문가 칼럼으로, SK하이닉스의 공식 입장과는 다를 수 있습니다.



