뉴스룸에서는 대구경북과학기술원 교수 7명과 함께 반도체 기본 모듈과 반도체 적용 사례, 메모리, 인터페이스 회로 등을 주제로 총 7편의 칼럼을 연재하고 있다.
이번 3편에서는 로봇 및 기계전자공학과 김회준 교수로부터 미래 로봇과 로봇의 발전을 이끄는 반도체 기술에 대해 알아볼 것이다.
※대구경북과학기술원(DGIST, Daegu Gyeongbuk Institute of Science and Technology): 반도체 융합기술, 뇌공학, 마이크로레이저 등 다양한 첨단 과학 기술을 연구하고 있다. 특히 반도체 분야에서는 전문적인 연구개발(R&D)과 함께 캠퍼스 내 반도체 제조 시설을 구축 운영하고 있다.
출근길, 자율주행 차량의 운전으로 조수석에서 편안히 휴식을 취하고, 로봇 집사가 집안일을 하는 모습을 상상해 보라. 로봇 기술이 우리의 요구에 부응하기 위해 빠르게 발전하고 있기에 가능한 상상이다. 이런 발전을 실현하기 위해서는 로봇 시스템이 감지, 구동, 데이터 처리, 의사 결정을 할 수 있게 만드는 정교한 반도체 기술이 필요하다.
자율성 향상부터 에너지 효율성까지: 로봇공학의 미래
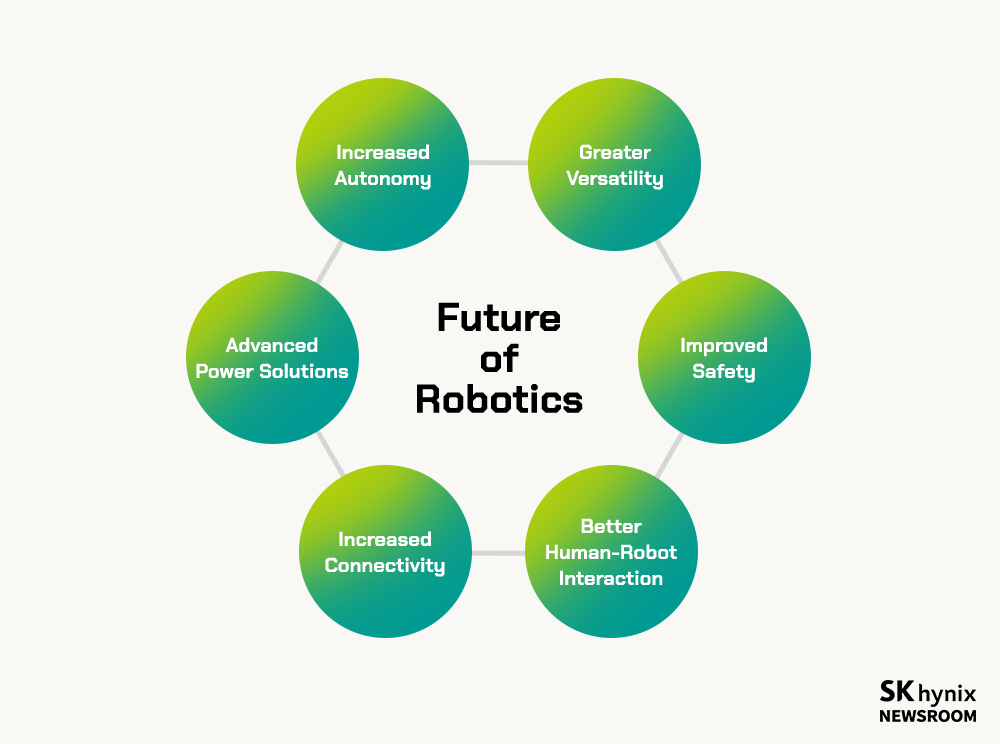
로봇 기술은 이미 다양한 산업 분야에서 활용되고 있으며, 고도화된 로봇에 대한 수요는 그 어느 때보다 높은 수준이다. 앞으로 로봇 기술이 발전함에 따라 정의될 6가지 중요한 특징을 살펴보자.
첫 번째로 미래 로봇 기술의 중요한 발전 방향은 ‘자율성 증가’이다. 현재 대부분의 로봇은 작업을 수행하기 위해 인간의 감독이나 프로그래밍이 필요하다. 그러나 미래 로봇은 자율성이 강화되어 환경을 통해 학습하고 독립적으로 의사결정도 할 수 있을 것으로 예상된다. 이렇게 스스로 사고하는 로봇은 인공지능(Artificial Intelligence, 이하 AI), 머신러닝, 컴퓨터 비전* 등 첨단 기술의 통합으로 가능해질 것이다.
* 컴퓨터 비전(Computer Vision) : 인공지능 분야 중 하나로, 컴퓨터와 시스템이 디지털 이미지, 비디오 및 기타 시각적 입력에서 의미 있는 정보를 추출해 해당 정보를 기반으로 직접 행동하거나 제안할 수 있는 기술
두 번째로 ‘다재다능’하다는 점도 다음 세대 로봇의 핵심 특징이 될 것이다. 현재 로봇은 제조업, 헬스케어, 스포츠 및 엔터테인먼트 등 광범위한 산업 분야에서 여러 작업을 수행할 수 있도록 개발되고 있다. 따라서 미래의 로봇은 모듈식 설계를 통해 다양한 환경과 상황에 적응하도록 쉽게 맞춤화하고 재구성할 수 있도록 설계될 것이다.
세 번째는 ‘안전성 개선’이다. 로봇이 여러 산업에서 사용되고 인간과 함께 작업하는 경우가 늘어나자 안전성 개선이 매우 중요한 사항이 되고 있다. 미래에는 상해 위험을 최소화하는 안전 기능이 탑재된 로봇이 개발될 것이다. 이미 충돌 감지, 압력 측정, 경보 시스템 같은 안전 기능은 많은 로봇에 상용화된 상태다.
네 번째는 ‘인간과의 상호작용 능력 향상’이다. 로봇이 우리의 일상에서 점점 더 중요한 역할을 하면서, 자연스럽고 직관적으로 인간과 상호작용할 수 있는 로봇을 설계하는 것도 중요해지고 있다. 인간-로봇 상호작용 기술(Human-Robot Interaction, HRI)에는 자연어 처리 및 음성 인식 기술과 함께, 로봇이 인간의 동작을 모방할 수 있도록 고급 센서 및 액추에이터(Actuator)*가 필요하다.
* 액추에이터(Actuator) : 전기, 기계, 유압, 공기압 등을 이용하여 움직이는 기계장치로, 입력 신호에 따라 움직임을 제어하거나 일정한 동작을 수행하는 장치. 로봇공학 분야에서는 액추에이터가 로봇의 팔, 다리, 머리 등과 같은 부분을 움직이는 등 로봇의 동작을 구현하는 핵심 장치다.
다섯 번째는 ‘연결성 증가’이다. 로봇은 인간과 상호작용하는 것뿐만 아니라 다른 로봇이나 디바이스와도 소통할 수 있어야 한다. 따라서 여러 디바이스가 원활히 통신할 수 있도록 지연시간이 짧고 신뢰성 높은 무선 통신 기술이 요구된다.
여섯 번째로 ‘향상된 전력 효율성’도 주요 발전 방향이다. 긴 시간 동안 작동해야 하는 로봇을 고려한다면 에너지를 효율적으로 사용할 방법을 개발해야 한다. 이에 따라 배터리, 연료 전지 같은 더 효율적인 전력 시스템이나 주변 에너지를 전력으로 변환해 사용할 수 있는 에너지 하베스팅(Energy Harvesting)* 기술이 함께 개발되고 있다.
* 에너지 하베스팅(Energy Harvesting) : 자연적인 에너지원으로부터 발생하는 에너지를 수집하고 저장하여 전기 에너지로 변환하여 사용하는 기술. 예를 들어 태양광이나 풍력과 같은 재생 에너지, 진동이나 열과 같은 대기 에너지 등을 수집하여 전기 에너지로 사용할 수 있다. 에너지 하베스팅 기술은 이동성이 있는 장치에 적용될 때 특히 유용해 핸드폰 충전기나 스마트워치, 무선 센서 및 로봇과 같은 장치에서 사용될 것으로 전망된다.
앞에서 언급한 모든 속성은 미래 로봇공학 발전에 결정적인 요소다. 위 모든 기능을 실현하려면 사고(프로세서), 로봇의 감지(센서), 움직임(액추에이터)에 필요한 첨단 반도체 기술이 통합되어야 한다.
미래 로봇공학에서 반도체 기술의 중요성
로봇이 더 똑똑하고, 빠르고, 뛰어난 적응력을 갖추게 되면서 감지, 구동, 데이터 처리를 효과적으로 할 수 있는 컴포넌트를 통합해야 할 필요성이 커지고 있다. 미래 로봇 기술의 잠재력을 실현하기 위한 컴포넌트는 반도체 기술에 크게 의존하고 있다. 각 컴포넌트와 반도체 기술이 어떻게 연관되어 있는지 살펴보자.
프로세서: ‘로봇의 두뇌’는 어떻게 로봇공학의 진화를 촉진할까?
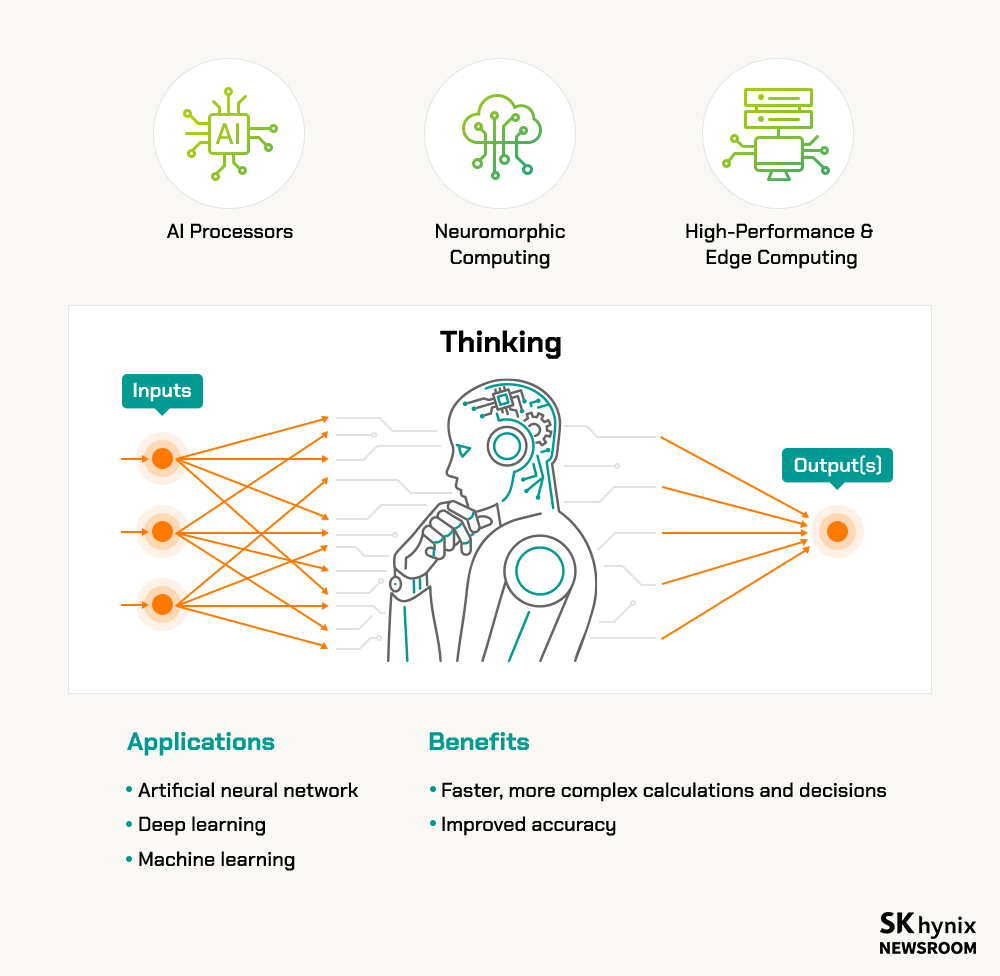
▲ 로봇의 사고 기능을 구현하는 프로세서와 기술
로봇공학의 발전을 이끌 핵심 반도체는 AI 프로세서로, AI 알고리즘을 빠르게 처리하기 위해 설계된 반도체다. AI 프로세서 덕분에 로봇이 의사결정을 하고 주변 환경과 실시간으로 상호작용할 수 있게 되는 것이다. 자율적으로 작동하는 로봇은 센서를 통해 실시간 데이터를 수집하고 이를 기반으로 의사결정을 하므로 AI 프로세서가 필수적이다.
의사결정 능력과 더불어, 근 몇 년 내에 로봇은 뉴로모픽 컴퓨팅*을 통해 인간과 더욱 유사하게 발전할 것이다. 뉴로모픽 컴퓨팅은 최신 반도체 기술로써 인간 두뇌의 구조와 기능을 모방하도록 설계됐다. 이 기술은 특히 로봇공학에서 빛을 발하는데, 로봇이 기존의 컴퓨팅 방식보다 더 빠르고 효과적으로 새로운 상황을 학습하고 적응할 수 있게 만든다.
* 뉴로모픽 컴퓨팅(Neuromorphic Computing) : 생물학적 뇌의 작동 원리를 모방해 만들어진 컴퓨팅 기술. 인간 두뇌의 뉴런과 시냅스를 모방하여 컴퓨터 구조와 알고리즘을 설계하며, 생물학적인 뇌처럼 병렬 처리와 자기 학습 기능을 갖추어 복잡한 패턴 인식과 분류, 추론 등의 작업을 수행할 수 있다.
앞으로 로봇은 더 많은 산업 분야에서 사용될 것이기 때문에 그래픽 처리장치(GPU) 및 FPGA*와 같은 고성능 컴퓨팅 기술을 사용해 실시간으로 방대한 양의 데이터를 처리 및 분석할 수 있어야 한다. 이러한 기술은 고도의 계산 능력이 필요한 이미지 및 음성 인식 등의 애플리케이션에 있어 특히 중요하다. 또한 엣지 컴퓨팅*은 연결이 제한되거나 원격 서버와의 실시간 통신이 불가능한 환경에서도 로봇이 작동할 수 있도록 해 준다.
* FPGA(Field Programmable Gate Array) : 사용자가 직접 프로그래밍하여 사용할 수 있는 반도체. 일반적인 프로세서처럼 회로가 고정적으로 설계되어 있지 않아, 사용자가 원하는 논리 회로를 직접 프로그래밍할 수 있다.
* 엣지 컴퓨팅(Edge Computing) : 클라우드 컴퓨팅과 반대되는 개념으로, 데이터 처리와 분석을 클라우드가 아니라 로컬 서버나 디바이스 자체에서 수행하는 것. 엣지 컴퓨팅은 데이터 전송과 처리 지연 시간을 줄이고 데이터 보안 측면에서도 이점이 있어 사물 인터넷(IoT)에서 많이 사용된다.
미래의 로봇공학에는 향상된 통신 기능도 필수적이다. 따라서 로봇이 실시간으로 작동 및 통신할 수 있도록 고속 5G 무선 기술을 충분히 활용해야 한다. 이를 통해 로봇은 복잡하고 역동적인 환경에서 이뤄지는 여러 가지 작업도 더욱 신속히 반응하고 처리할 수 있을 것이다.
또한 로봇은 상당한 전력이 필요하다. 로봇의 발전에 따라 장시간 작동을 위해 더욱 진보한 전력 관리 기술이 필요할 것이다. 앞서 언급한 에너지 하베스팅, 향상된 배터리, 무선 충전 기술로 외부 전원과의 물리적 연결이 없이도 작동 가능해질 것으로 보인다.
센서: 미래 로봇은 인간처럼 세상을 인식할 수 있을까?
첨단 반도체 기술은 로봇의 의사결정 및 의사소통 능력 향상은 물론 센서로 환경을 감지하여 행동하는 능력도 강화시킬 것이다.
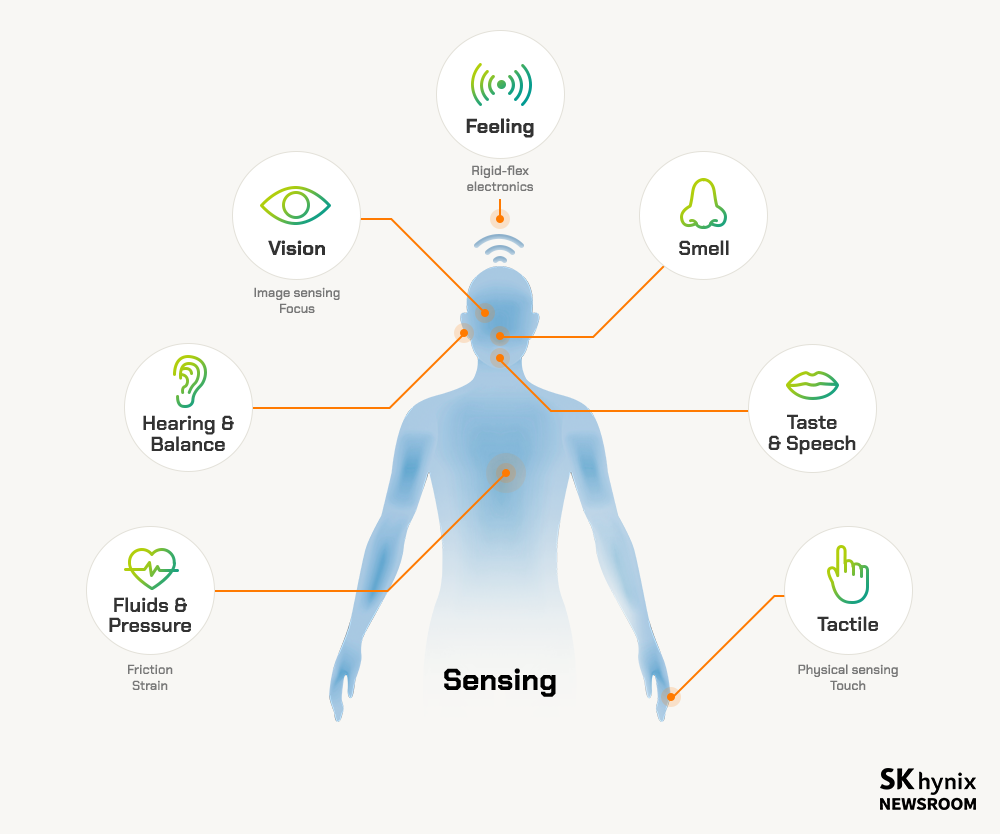
▲ 미래 로봇의 다양한 잠재 감각
CMOS 이미지 센서(이하 CIS)*는 카메라를 비롯해 여러 이미지 애플리케이션에서 널리 사용되고 있다. 로봇공학 관점에서, 로봇은 CIS를 통해 환경을 ‘보고’ 해석할 수 있게 될 것이다. CIS는 저전력 센서로 가볍고, 고품질 이미지를 캡처할 수 있어 로봇 사용에 이상적이다. SK하이닉스는 미래 로봇이 물체를 인식하는 방식을 혁신적으로 개선할 수 있는 ToF* 기술을 개발하고 있다.
* CMOS 이미지 센서(CMOS Image Sensor, CIS) : CMOS** 기술을 사용하여 빛을 전기 신호로 변환하는 이미지 센서. 전력 소비가 적고 크기가 작아 대부분의 디지털 카메라와 스마트폰에서 사용되고 있다.
** CMOS(Complementary Metal-Oxide-Semiconductor) : 집적회로를 만드는 기술로 전력 소비를 줄이고 더 높은 집적도를 실현할 수 있다. 이 때문에 주로 이미지 센서, 프로세서, SRAM의 집적회로를 만드는 데 쓰인다.
* ToF(Time-of-Flight) : 파동이나 입자가 이동하는 거리를 측정하는 기술. ToF 기술이 적용된 센서는 광신호가 센서에서부터 물체까지 이동하고 돌아오는 시간을 측정해 거리를 계산한다.
환경을 인식하는 데 쓰이는 또 다른 센서는 LiDAR*가 있는데, LiDAR는 레이저를 사용하여 주변 환경의 3D 지도를 생성하며, 이미 자율주행 차량에 활용되고 있어 앞으로 더욱 중요해질 것이다. LiDAR는 로봇이 복잡한 환경을 탐색하고 실시간으로 장애물을 피할 수 있게 해 준다.
* LiDAR(Light Detection and Ranging) : 레이저를 사용해 거리를 측정하는 기술. 레이저를 쏘아 반사되는 광선의 시간 차이를 이용해 대상물과의 거리를 계산한다.
센서는 환경을 탐지해 경고를 발령할 수 있어 안전 목적에도 사용할 수 있다. 예를 들어 가스 센서는 반도체 기반 센서로서 특정 가스의 존재를 감지할 수 있다. 이를 로봇에 적용하면 가스 센서로 독성가스, 기타 유해 물질의 존재를 탐지하고 환경 변화를 감지해 대응할 수 있게 된다. 물론 독성가스 외에도 다양한 화학 센서를 로봇에 탑재할 수 있을 것이다. 최근에는 대기오염을 측정하기 위해 미세먼지 센서를 탑재한 드론도 상용화되었다.
센서는 외부 환경 감지는 물론, 그 환경 속에서 움직이는 로봇 자신의 동작도 식별해야 한다. 미세 전자기계 시스템(Micro-Electromechanical Systems, 이하 MEMS)* 센서는 가속도, 회전, 압력을 포함해 여러 물리적 매개변수를 감지한다. MEMS 센서는 로봇이 방향, 움직임 및 기타 물리적 매개변수를 감지할 수 있게 해주며, 이미 스마트폰, 웨어러블, 자동차 시스템 등에 탑재돼 다양한 용도로 사용되고 있다.
* 미세 전자기계 시스템(Micro-ElectroMechanical Systems, MEMS) : 전자기계 소자를 반도체 미세 공정 기술을 활용해 제작하는 것. 실리콘 기판 위에 센서, 액추에이터, 전기 회로를 밀리미터에서 마이크로미터의 크기로 한 기판에 탑재한다.
액추에이터: 미래의 로봇은 어떻게 움직일까?
센서는 로봇이 환경을 인식하게 해준다면, 액추에이터는 로봇이 주변 세계와 상호 작용할 수 있게 해준다.
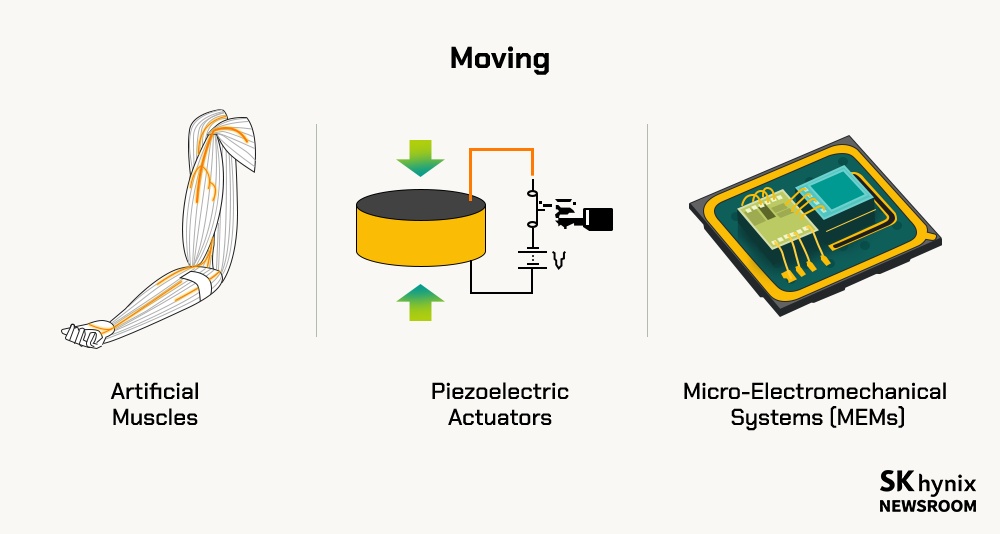
▲ 로봇의 이동을 가능하게 하는 액추에이터 유형
미래의 로봇은 오늘날의 일반적인 로봇과 달리 더 유연하고 섬세한 동시에 효율적인 작동 체계를 갖출 것으로 예상된다. 앞으로 개발될 ‘소프트’ 로봇은 유기체의 유연한 움직임을 모방하기 위해 설계되고, 전기 활성 폴리머(이하 EAP)*로 된 유연한 인공 근육으로 구현될 것이다. 전기 자극에 반응해 모양이 변하는 EAP는 인공 근육을 만드는 데 이상적인 소재로, EAP로 가볍고 유연한 액추에이터를 만들어 다양한 움직임을 구현할 수 있을 것이다. 추가로 온도나 전류에 의해 변형할 수 있는 형상기억합금*이 있다. 형상기억합금은 우주탐사용 그리퍼* 및 액추에이터 등 일부 로봇 애플리케이션에서 이미 적용되고 있으며 로봇의 발전에 따라 더 보편화될 것으로 보인다.
* 전기 활성 폴리머(Electroactive Polymers, EAP) : 전기 신호에 반응하여 변형되는 고분자 구조체. EAP는 전기 자극에 따라 확장, 수축, 굴곡, 회전 등의 운동을 할 수 있다.
* 형상기억합금(Shape Memory Alloy, SMA) : 형태를 기억해 열을 가하면 원래의 형태로 돌아가는 합금. 다른 재료와 달리 변형되어도 다시 원복 되기 때문에 우주 산업, 자동차 부품, 의료기기 등 다양한 분야에서 활용된다.
* 우주탐사용 그리퍼 : 물체를 쥘 수 있는 손 모양 로봇 팔을 부착한 기기나 이동 수단. 외계 행성에서 주로 샘플을 수집하거나 환경을 탐색하는 데 쓰인다.
전기 에너지를 직접적으로 선형 운동으로 변환하는 압전 액추에이터*도 로봇공학 분야에서 널리 사용되고 있으며, 미래에 더욱 보급될 것으로 예상된다. 압전 액추에이터는 작고 가볍고 정밀하다는 특징을 가지고 있어, 마이크로 로봇 및 의료기기와 같은 응용 분야에 쓰기 더욱더 이상적이다. 또한 최근 고성능 압전 박막 증착 기술의 발전으로 압전 액추에이터 채택이 더욱 대중화될 것으로 보인다. 비슷하게 MEMS 액추에이터도 작고 움직임이 정밀하다는 특징이 있다. 현재 센서와 스위치를 비롯한 다양한 장치에서 사용되고 있는 MEMS 액추에이터 역시 로봇에 더 보편적으로 탑재될 것으로 예상된다.
* 압전 액추에이터(Piezoelectric Actuator) : 압력이 가해질 때 물질의 전기적 특징이 변하는 압전 효과를 이용한 액추에이터. 전기 신호를 가하지 않고도 제어할 수 있으며 높은 정확도와 반응 속도를 가지고 있어 로봇공학과 자동화 분야에서 많이 사용된다.
로봇공학의 미래를 여는 열쇠
반도체 기술은 미래 로봇 센서의 능력을 실현하게 하는 핵심 역할을 할 것이다. 이러한 반도체 기술이 AI, 액추에이터, 센서 및 기타 영역의 발전과 결합하면서 로봇은 더욱 발전해 우리의 일상생활에 파고들 것이다. SK하이닉스는 구성품의 설계, 제조 및 시스템화에 필요한 최고 수준의 자원을 갖추고 있어 미래 로봇공학용 반도체 제품의 글로벌 리더가 될 것으로 기대된다.
※ 본 칼럼은 반도체에 관한 인사이트를 제공하는 외부 전문가 칼럼으로, SK하이닉스의 공식 입장과는 다를 수 있습니다.